

(本網(wǎng)訊:汪兆棟)景德鎮(zhèn)學(xué)院工業(yè)自動(dòng)化與智能控制團(tuán)隊(duì)專注于在機(jī)器人與自動(dòng)化領(lǐng)域的持續(xù)科研創(chuàng)新,團(tuán)隊(duì)青年教師王發(fā)良以第一作者身份在IEEE Transactions on Fuzzy Systems (中國(guó)科學(xué)院1區(qū)Top,IF= 11.9)、Journal of The Franklin Institute(中國(guó)科學(xué)院2區(qū),IF= 4.1)、 Journal of Vibration and Control(中國(guó)科學(xué)院3區(qū),IF=2.8)等領(lǐng)域國(guó)際知名期刊發(fā)表系列原創(chuàng)研究論文,團(tuán)隊(duì)負(fù)責(zé)人汪兆棟博士為論文合作作者。以上研究得到了國(guó)家自然科學(xué)基金、浙江省尖兵計(jì)劃項(xiàng)目,安徽省重點(diǎn)研究與開發(fā)計(jì)劃項(xiàng)目、江西省教育廳科學(xué)技術(shù)研究項(xiàng)目等經(jīng)費(fèi)支持。
具有良好的軌跡跟蹤控制性能是機(jī)械臂的基本要求之一,然而在實(shí)際情況中,不確定性不可避免存在,并且會(huì)降低機(jī)械臂系統(tǒng)的控制性能,如何設(shè)計(jì)高效的控制策略保證機(jī)械臂在不確定影響下實(shí)現(xiàn)高速、高精度的軌跡跟蹤控制具有重要的工程應(yīng)用價(jià)值。基于伺服約束的觀點(diǎn),本文研究了具有不確定性的機(jī)械臂的預(yù)設(shè)性能自適應(yīng)魯棒控制。首先,利用預(yù)設(shè)性能函數(shù)對(duì)系統(tǒng)跟蹤誤差進(jìn)行約束。其次,結(jié)合狀態(tài)轉(zhuǎn)換函數(shù)使系統(tǒng)跟蹤誤差的預(yù)設(shè)性能約束問題轉(zhuǎn)換為一個(gè)新的系統(tǒng)變量的有界性問題。最后,考慮到系統(tǒng)控制性能和控制輸入成本之間存在權(quán)衡,利用模糊集理論對(duì)不確定進(jìn)行描述,并基于此,探索了控制器的參數(shù)優(yōu)化問題。
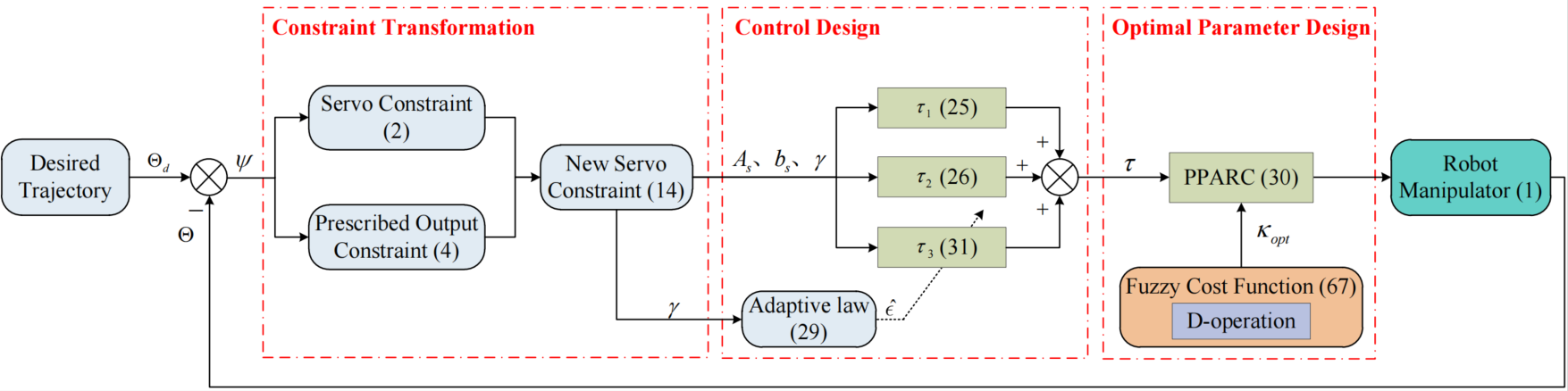
控制結(jié)構(gòu)框圖 王發(fā)良供圖
原文鏈接:https://ieeexplore.ieee.org/document/10274863
在實(shí)際應(yīng)用中,由于受到非結(jié)構(gòu)化環(huán)境、測(cè)量誤差以及自身機(jī)械結(jié)構(gòu)限制等不確定因素的影響,單機(jī)械臂在某些場(chǎng)景無法滿足復(fù)雜任務(wù)的要求。當(dāng)采用兩個(gè)或者多個(gè)協(xié)作機(jī)械臂時(shí),許多單個(gè)機(jī)械臂難以完成的任務(wù)工作都能夠得到解決。當(dāng)多個(gè)機(jī)械臂共同操縱同一個(gè)物體時(shí),由于形成了閉環(huán)運(yùn)動(dòng)鏈,機(jī)械臂的運(yùn)動(dòng)會(huì)受到一系列運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)約束。因此,與單機(jī)械臂的控制相比,多機(jī)械臂的控制要復(fù)雜得多。此外,在實(shí)際控制中,系統(tǒng)中不可避免地存在參數(shù)擾動(dòng)、外界干擾及未建模動(dòng)態(tài)等不確定性,上述問題均給機(jī)械臂的高精度軌跡跟蹤帶來了困難。本文將軌跡跟蹤控制任務(wù)視為施加在系統(tǒng)上的伺服約束,然后提出了一種自適應(yīng)魯棒約束跟隨控制器,能夠保證多機(jī)械臂操作同一個(gè)物體沿著期望的軌跡運(yùn)動(dòng),最后,基于模糊集合理論以及合作博弈理論研究了雙控制參數(shù)優(yōu)化問題。
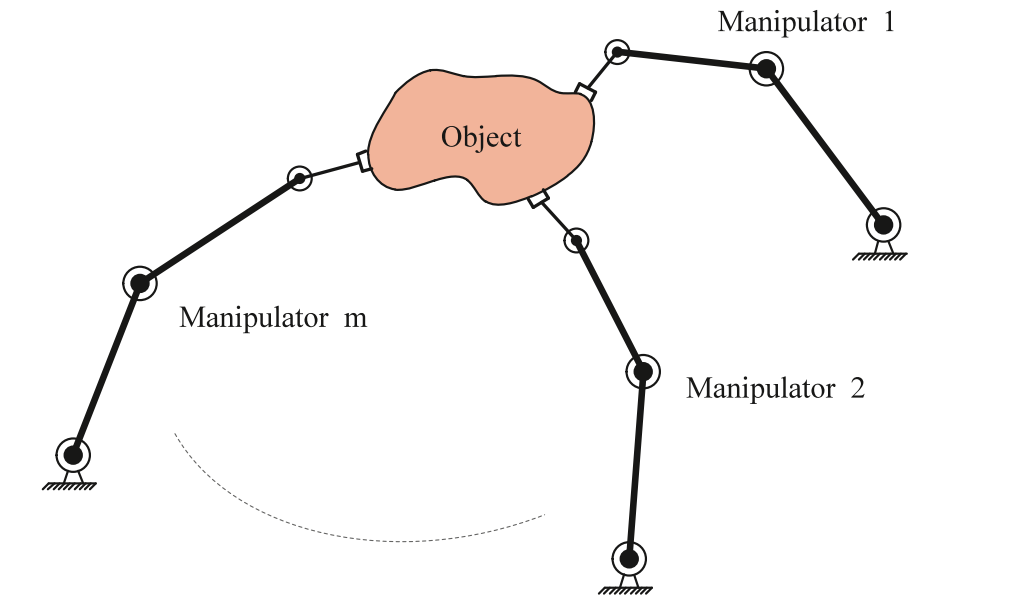
多機(jī)械臂協(xié)同操作同一個(gè)物體 王發(fā)良供圖
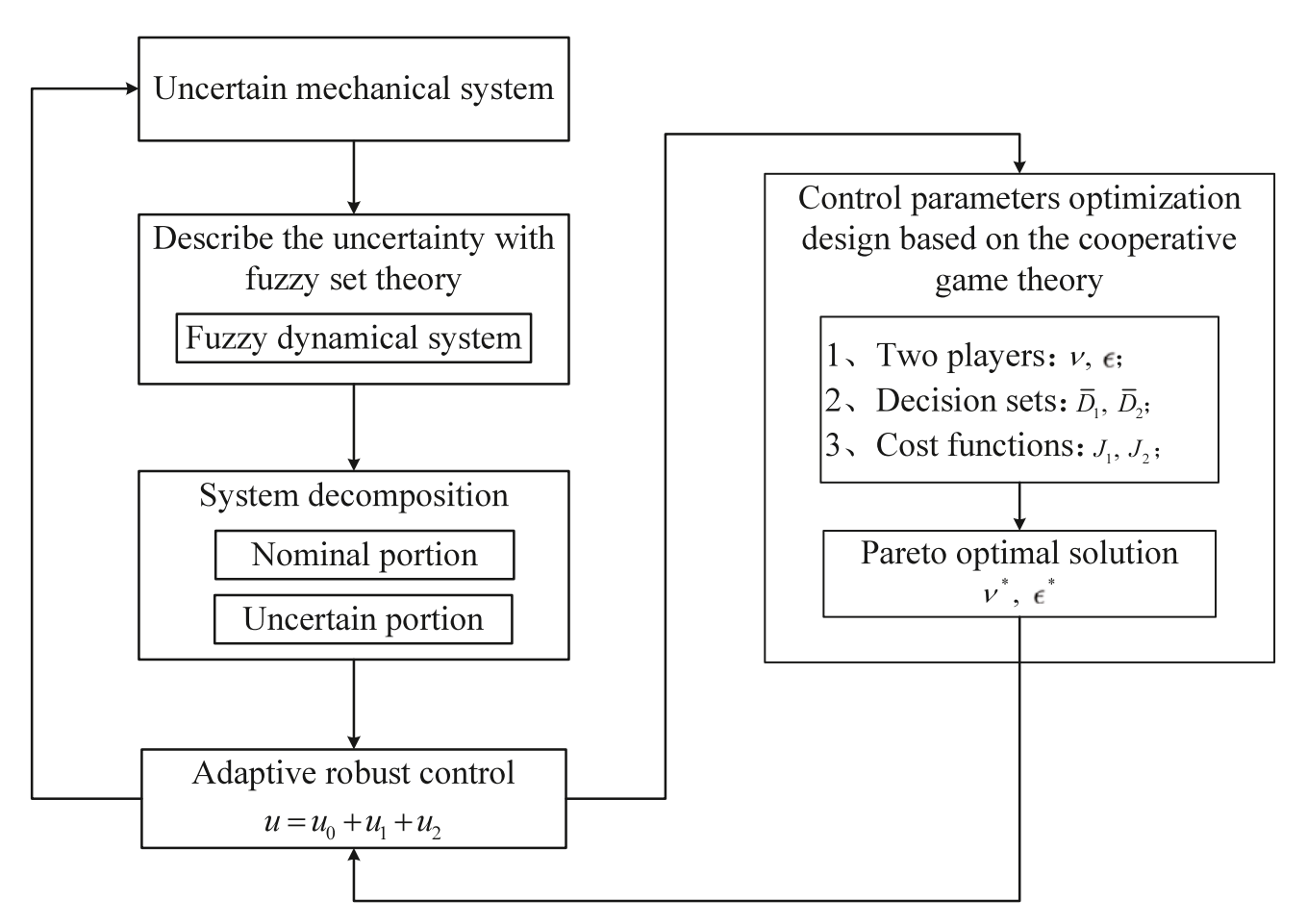
控制器設(shè)計(jì)流程 王發(fā)良供圖
原文鏈接:https://doi.org/10.1016/j.jfranklin.2023.09.030
由于永磁直線同步電機(jī)省去了中間機(jī)械傳動(dòng)裝置,消除了機(jī)械間隙與彈性形變等非線性影響,具有高速度、高精度、可靠性好等優(yōu)點(diǎn),廣泛用于高速精密數(shù)控、半導(dǎo)體制造業(yè)、機(jī)器人系統(tǒng)等高端制造行業(yè)。但是由于直線電機(jī)缺少中間緩沖環(huán)節(jié),使系統(tǒng)參數(shù)變化、外部擾動(dòng)、非線性摩擦力等不確定因素直接作用在電機(jī)動(dòng)子上,從而增加了控制上的難度。因此,需要設(shè)計(jì)既具有強(qiáng)魯棒性又能提高響應(yīng)速度的控制器,使系統(tǒng)實(shí)現(xiàn)高精密控制。本文基于伺服約束跟蹤的思想,設(shè)計(jì)了一種不依賴于不確定性邊界信息的自適應(yīng)魯棒約束跟蹤控制器,并基于不確定性的模糊描述,探討了控制器單參數(shù)優(yōu)化問題。
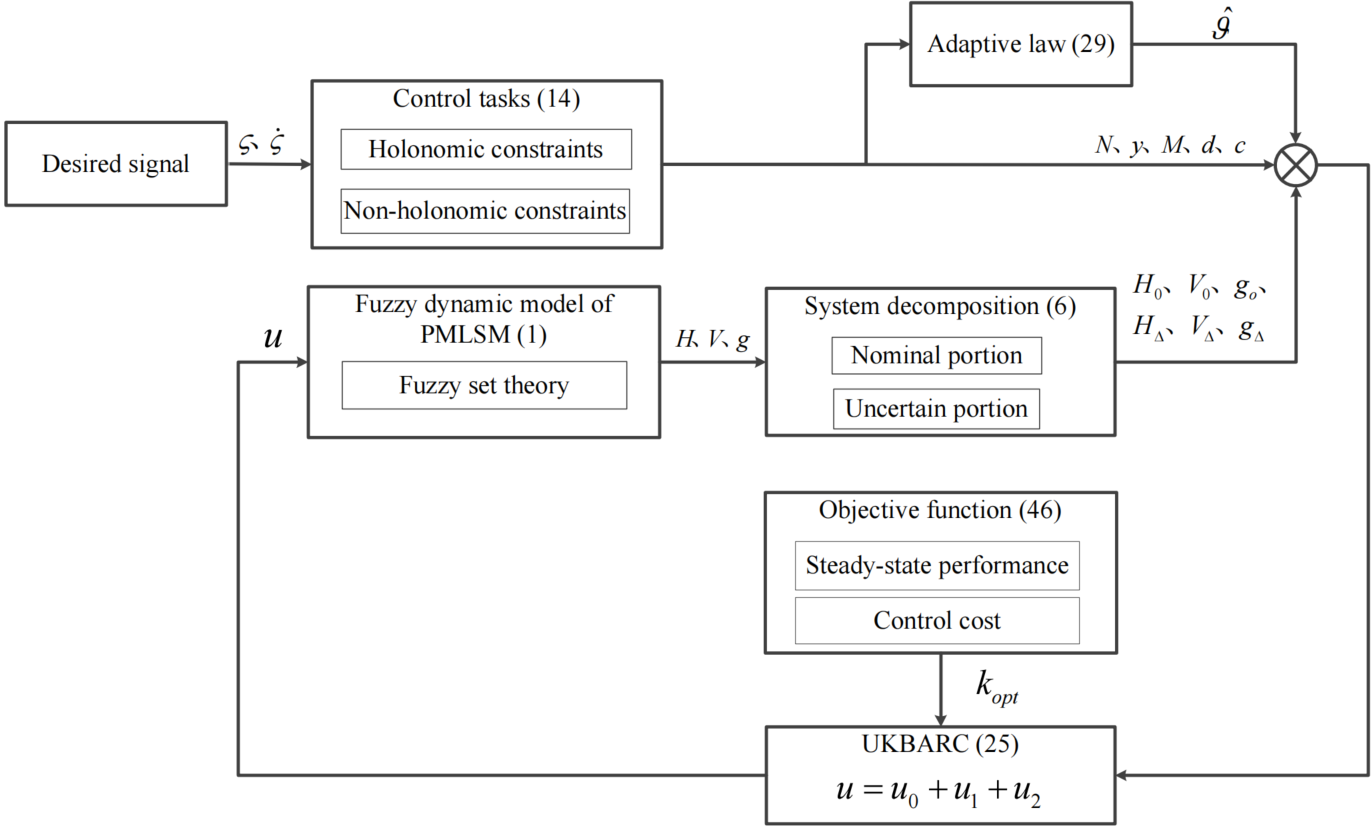
控制結(jié)構(gòu)框圖 王發(fā)良供圖
原文鏈接:https://doi.org/10.1177/10775463221149086
汪兆棟博士科研團(tuán)隊(duì)長(zhǎng)期從事工業(yè)自動(dòng)化與智能控制的研究與應(yīng)用,先后在IEEE Transactions on Fuzzy Systems、Journal of The Franklin Institute、Journal of VibrationandControl、電工技術(shù)學(xué)報(bào)、華南理工大學(xué)學(xué)報(bào)(自然科學(xué)版)、電源學(xué)報(bào)等國(guó)際、國(guó)內(nèi)一流期刊上發(fā)表SCI、EI、CSCD論文10余篇,為學(xué)校應(yīng)用型本科建設(shè)提供了有力支撐。
(供稿:機(jī)械電子工程學(xué)院王發(fā)良)
(編輯:鄧舒馨/一審一校:李婷婷/二審二校:胡鉑/三審三校:趙雪政)








 當(dāng)前位置:
當(dāng)前位置: